I'm a Mechatronics & Robotics Engineer based in Bristol, UK. My background spans regulated medical devices under ISO 13485 and fast-paced R&D, with deep hands-on work in fault investigation, embedded systems, miniature sensors, PCB design and assembly.
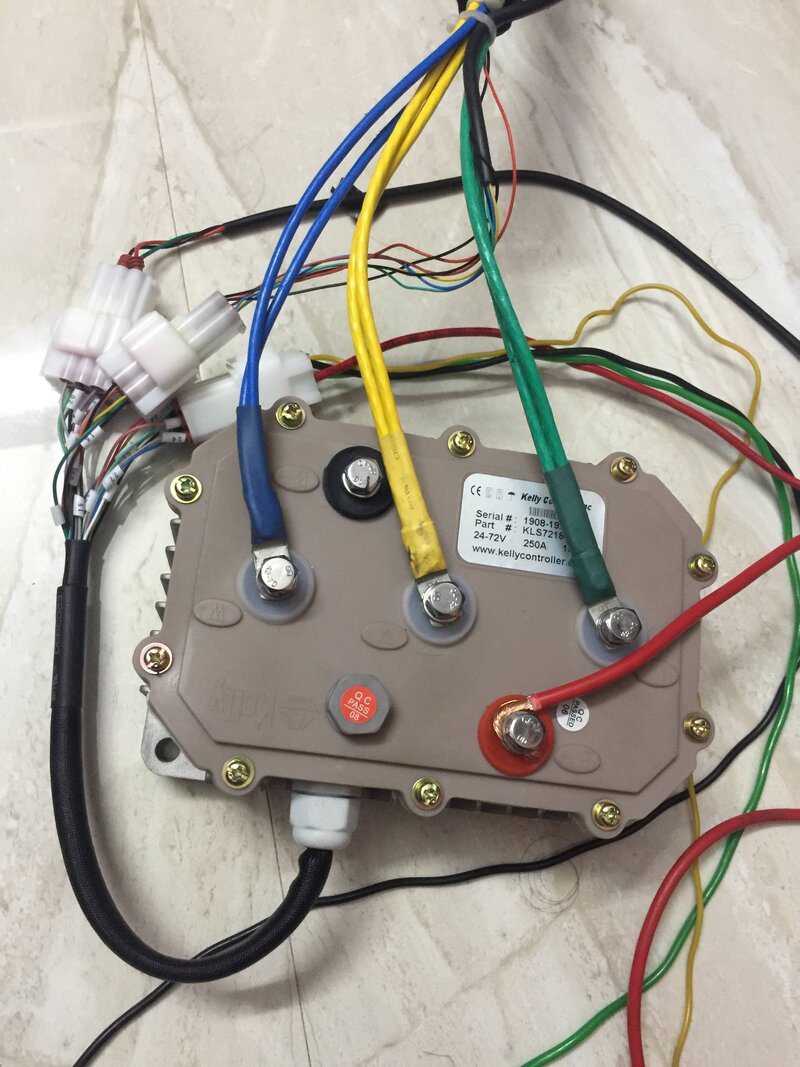
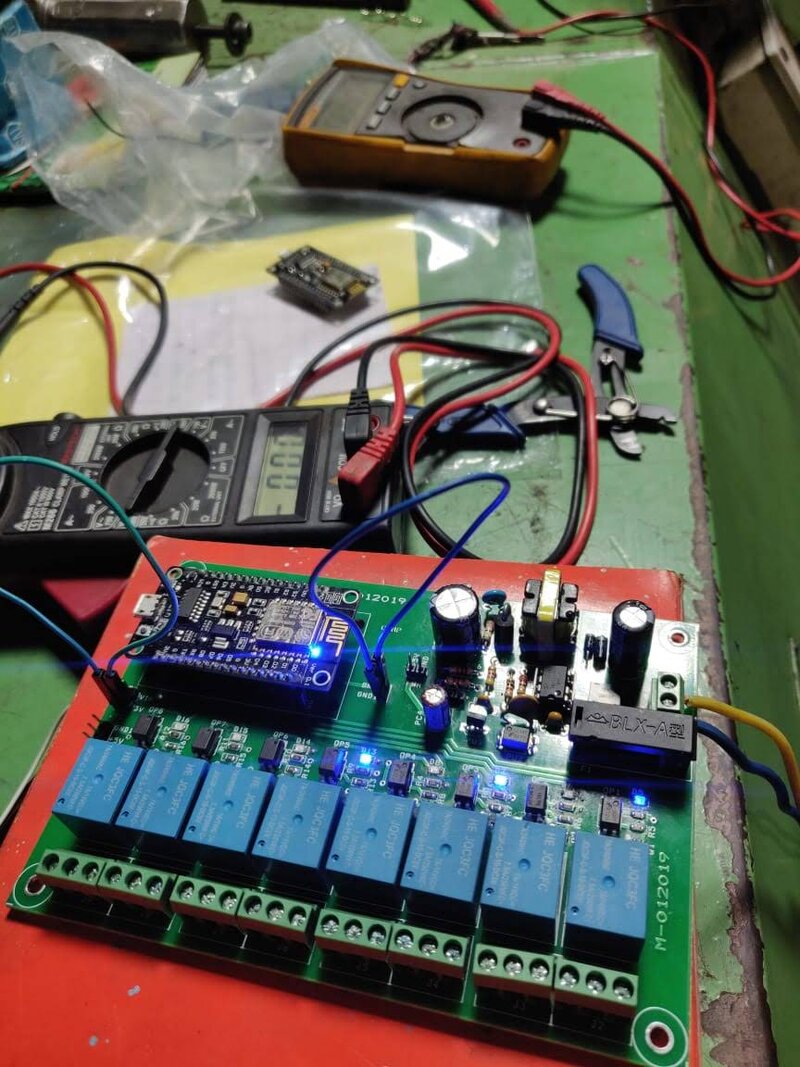
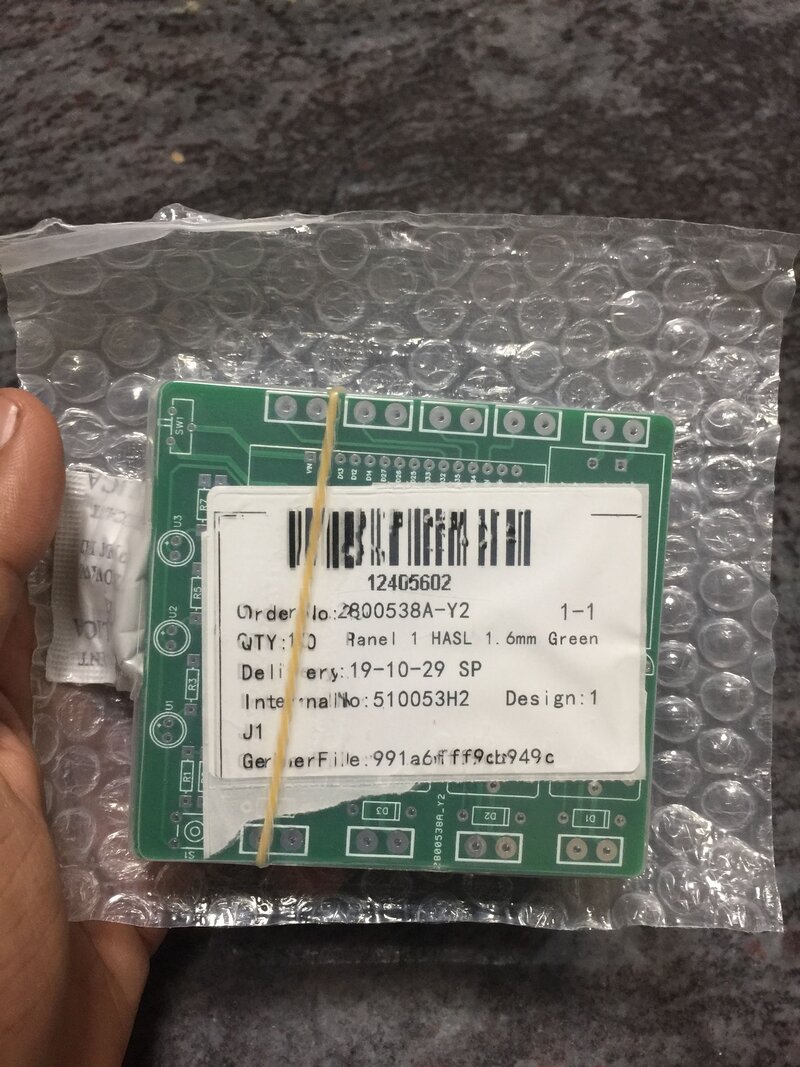
At Earswitch, I design and prototype miniaturised CMOS-based optical sensor modules, evaluate image sensors, and investigate failures across sensor, flex-PCB, and assembly levels. Previously, I've designed PCB layouts for real-time sensing systems, built evaluation rigs and testing jigs.
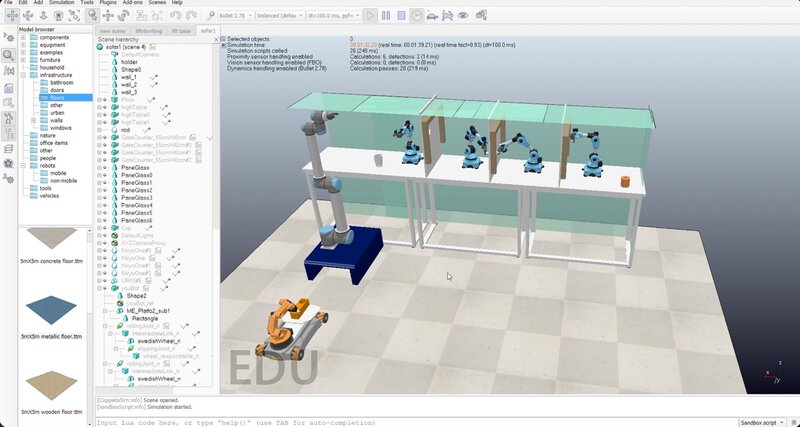
I hold an MSc in Robotics & Autonomous Systems from the University of Bath (Global Leaders Scholarship) and a BEng in Mechatronics from Anna University, India.